

Читать в полной версии
Разработчики из независимой студии Steelkrill анонсировали Rotten Flesh — хоррор с элементами выживания, в котором главный герой разыскивает пропавшую собаку по кличке Рой. Для прохождения проекта рекомендуется использовать микрофон, что обусловлено важной геймплейной особенностью.
Источник изображения: Steelkrill Studio
Блуждая по тёмным коридорам в поисках пса, игроку нужно будет кричать «Рой!» в микрофон. Последний можно и не использовать — в таком случае звать собаку будет уже протагонист по нажатию отдельной кнопки. Но для полного погружения в атмосферу хоррора разработчики рекомендуют использовать именно свой голос.
Разыскивая питомца, главный герой непременно привлечёт внимание недружелюбно настроенных существ, поэтому голосовую команду важно использовать с особой осторожностью. Система скрытности в Rotten Flesh достаточно проработанная — бесстрашному собачнику придётся прятаться под столами, сохранять в нужные моменты тишину (если микрофон используется), пытаться не наступить на разбитое стекло и так далее.
Набор локаций хоррора Rotten Flesh — это «ужасающие» и «вызывающие чувство тревоги» канализационные трубы и тоннели, населённые адептами странного культа. Игра предлагает не только заниматься поисками пропажи, но ещё разгадывать головоломки, комбинируя предметы в инвентаре и применяя нужные инструменты.
Даты релиза у Rotten Flesh пока нет, но есть своя страничка в Steam.
Ротор — это тело, которое вращается вокруг некоторой оси и удерживается своими несущими поверхностями в опорах. Несущие поверхности ротора передают нагрузки на опоры через подшипники качения или скольжения. Под несущими поверхностями подразумеваются поверхности цапф* или поверхности их заменяющие.
*Цапфа (нем. Zapfen «цапфа, шейка, шип, втулка, стержень») — часть вала или оси, на которой находится опора (подшипник). Цапфа, находящаяся на краю вала, называется шип, в средней части вала — шейка. Концевая цапфа, воспринимающая осевые нагрузки, — пята.
рис.1 Ротор и действующие на него центробежные силы.
В идеально сбалансированном роторе его масса распределяется симметрично относительно оси вращения, т.е. любому элементу ротора можно поставить в соответствие другой элемент, расположенный симметрично относительно оси вращения. На каждый элемент ротора при вращении действует центробежная сила направленная в радиальном направлении (перпендикулярно к оси вращения ротора). В сбалансированном роторе центробежная сила, действующая на любой элемент ротора, уравновешивается центробежной силой, действующей на симметричный элемент. Например на элементы 1 и 2 ( на рисунке 1 обозначены зеленым цветом) действуют центробежные силы F1 и F2 равные по величине и противоположные по направлению. Это верно для всех симметричных элементов ротора и таким образом суммарная центробежная сила, действующая на ротор равна 0 и ротор является уравновешенным. Но если симметрия ротора нарушена ( на рис.1 несимметричный элемент обозначен красным цветом), то на ротор начинает действовать неуравновешенная центробежная сила F3.
При вращении эта сила меняет направление вместе с поворотом ротора. Динамическая нагрузка, возникающая от действия этой силы передается на подшипники, что приводит к их ускоренному износу. Кроме того под действием этой переменной по направлению силы происходит циклическая деформация опор и фундамента, на котором закреплен ротор, то есть возникает вибрация. Для устранения дисбаланса ротора и сопутствующей ему вибрации необходимо установить уравновешивающие массы, которые восстановят симметрию ротора.
Балансировка роторов — это операция по устранению дисбаланса путем добавления уравновешивающих масс.
Задачей балансировки является нахождение величины и места (угла) установки одной или нескольких уравновешивающих масс.
Актуальность данной работы заключается в выявлении особенностей взаимосвязи важных личностных черт. Так невозможность личности взять ответственность на себя, а также восприятие большинства ситуаций как угрожающие, может привести к различным конфликтам, а также личностным изменениям. Всё вышеперечисленное может актуализироваться в условиях тяжелой и сложной работы, что в свою очередь будет приводить к рабочим конфликтам, не возможности нормально взаимодействовать с другими членами коллектива, что может привести весь рабочий процесс в хаос. Для такой важной и значимой профессии в сфере мореходства, как судомеханик важно, чтобы каждый специалист был ответственным, мог быстро адаптироваться к рабочей задаче.
Исходя из определения мы узнаём, что входит в свойства личности. Все вышеперечисленные свойства будут формироваться с течением жизни человека, но их формирование будет происходить на основе наследственности человека, другими словами определённых качеств нервной системы, динамики нервных процессов, анатомо-физических особенностей.
В нашей работе мы рассмотрим такие свойства личности как локус контроля и тревожность, раскроем данные понятия, а также как они проявляются в поведении человека.
Цель: изучить особенности взаимосвязи локуса контроля и уровнем личностной тревожности.
Методы исследования: психодиагностическое тестирование.
Методики исследования: Уровень субъективного контроля ( УСК) Е. Ф. Бажин, Е. А. Голынкина, А. М. Эткинд, Шкала тревоги Спилбергера-Ханина (STAI)
В исследовании приняли участие 14 судовых специалистов, работающих по специальности судомеханик.
Гипотеза исследования: существует взаимосвязь между уровнями субъективного контроля, личностной тревожностью: чем выше уровень субъективного контроля, тем менее выражен уровень личностной тревожности.
Важнейшим вкладом Джулиана Роттера в современную психологию были модели, по которым можно предсказать человеческое поведение. Основная закономерность или по-другому формула, которую он разработал, даёт возможность предположить целенаправленность поведения в определённой ситуации, при этом нужно пользоваться понятиями : «потенциал поведения», «ожидание», «подкрепление», «ценность подкрепления».
Согласно мнению Дж. Роттера локус контроля относится к устойчивым свойствам личности, а различия в локализации контроля возникают в процессе обучения, а также в семье. Другими словами возникновение и формирование локуса контроля происходит непосредственно в процессе социализации, а также стечением времени становится уже устойчивым свойством, которое в своё очередь определяет некоторые аспекты поведения личности.
Как мы писали выше существует внутренний или интернальный локус контроля, а также внешний или экстернальный локус контроля. Данное разделение на типы связанны с тем где происходит локализация контроля над значимыми жизненными событиями. Важно отметить что, как раз таки тип локализации будет отвечать за особенности поведенческого реагирования в широком контексте социального взаимодействия, что в свою очередь будет связано с уровнем активности и чувством ответственности личности, всё это будет влиять на ощущение «контролируемости» насыщенности жизненных событий. Становясь устойчивой характеристикой личности локус контроля, также будет являться универсальной характеристикой при этом неизменной относительно любых типов событий и ситуаций, с которыми будет сталкиваться личность.
На данный момент локус контроля является одним из наиболее распространённым и исследуемых конструктов, как в рамках отечественной психологии так и в зарубежной.
Для начала стоит развести два существующих в психологии понятия «тревога» и «тревожность». Обратившись к словарю практического психолога, становиться ясно, что :
Проанализировав эти определения сразу становиться понятно, что тревога будет являться эмоциональным состоянием, то есть оно будет вызвано переживанием человека относительно внешней среды и к самому себе. Тревожность же будет являться свойством личности, его индивидуальной особенностью.
Обращаясь к современным исследованиям тревожности, то мы увидим что они направлены на отличие ситуативной тревожности и личностной тревожности.
Основываясь на выше сказанном, мы обращаемся к американскому психологу Ч. Спилбергу, который рассматривает ситуативную тревожность как «Т-состояние», а личностную как «Т-свойство».
Ранее мы рассматривали ещё одну личностную характеристику «локус контроля», согласно данным К. Муздыбаева существует положительная корреляция между экстернальностью и повышенной тревожностью. Сначала может показаться странным, что экстрерналы более склонны к тревожности, так как они видят причину своих неудач во внешней среде, а не в себе. Если рассматривать П. В. Симонова и его информационную теорию эмоций, то эмоции и их уровень будет определяться следующей структурной формулой:
Э-эмоции; П-актуальная потребность личности; ин, Ии- информация необходимая и информация, которая имеется у субъекта, на основании которой он может судить об возможности удовлетворения потребности.
В сущности, выражение в скобках является мерой неопределённости ситуации, чем выше будет неопределённость, тем выше будет эмоциональное напряжение. Экстернал же будет субъективно всегда находится в ситуациях большей неопределённости, это связанно с тем что он не сам контролирует жизненные события. Сама жизнь и её события будут определяться обстоятельством, случаем, волей других людей. Всё вышесказанное будет представлять собой благоприятную основу для развития неопределённости, а это в свою очередь будет вызывать эмоциональное напряжение и тревожность.
Нужно отметить, что всё вышесказанное не будет являться абсолютным, и всегда есть варианты для индивидуальных случаев.
Профессия судового механика несёт ряд определённым требований не только по выполнению своих должностных обязанностей, но и к человеку, который решил освоить и также работать по данной специальности.
Судомеханик — это специалист мореходства, обязанностью которого является организация бесперебойной, безопасной и нормальной работы всех судовых механизмов и систем. Он несет ответственность за экономное, бесперебойное и безопасное использование, обслуживание и ремонт судового оборудования.
Исходя из выше представленного определения мы узнаём, что у судомеханика есть свои обязанности, которые связаны с работой судовых механизмов и систем, а также ответственность связанная с использованием а также ремонтом судна. Помимо этого судомеханик является специалистом мореходства, но не все представители данной профессии остаются в море, некоторые также работают по специальности, но уже на заводах по судоремонту.
Если обраться к классификации профессий Е. А. Климова, то судомеханик относиться к профессии типа человек-техника, так как профессией его труда будет являться технические объекты. Судомеханик занимается ремонтом, обслуживанием судовых механизмов и систем, о чем мы говорили ранее. Помимо этого для успешно выполненного ремонта специалист должен иметь обширные знания по техническим характеристикам, уметь читать схемы, чертежи механизмов и систем, обращаться с инструментами, должен знать материаловеденье, сопротивление материалов, термодинамику.
Если говорить о условиях труда, то это работа в необычных условиях, а также в условиях повышенной моральной ответственности. После судового ремонта, судно уходит обратно на свой рейс, и конечно же организация чья бригада судомехаников выполнила его, даёт гарантию за выполнений ремонт. Если был проведёт некачественный ремонт, то не исключены поломки, что может случиться в любой момент рейса и поставить под угрозу не только сроки по выполнению рейса, заключённый контракт, но и здоровье членов экипажа.
На основании вышеизложенного можно выделить профессионально важные качества, которыми должен обладать специалист в данной области:
Абсолютные: ответственность, высокая концентрация внимания, хорошо развитая мелкая моторика, техническое мышление, физическая сила, готовность работать в экстремальных условиях труда.
Относительные: готовность к сотрудничеству, логико-стратегическое мышление, лидерские качества.
Анти — профессионально важные качества: тревожность, клаустрофобия, низкая концентрация внимания, неумение правильно распределить рабочее время.
На основании проведённого тестирования мы получили следующие результаты, по методике «Уровень субъективного контроля ( УСК) Е. Ф. Бажин, Е. А. Голынкина, А. М. Эткинд» результаты представлены в Таблице 1, а по методике «Шкала тревоги Спилбергера-Ханина (STAI)» результаты представлены в Таблице 2.
Таблица 1 – результаты по методике уровень субъективного контроля (УСК)
Из полученных данных мы узнаём, что по шкале «общей интернальности» у 10 респондентов экстернальный локус контроля, как правило такие люди не видят связи между своими действиями и значимыми для них событиями в жизни, есть склонность к приписыванию к большинству событий и поступков внешнему влиянию (результат случая, действия других людей).
У четырёх респондентов интернальный локус контроля, они как правило считают, что большинство важных событий в их жизни являются результатом их собственных действий. Им свойственно чувствовать свою ответственность за события в своей жизни, а также за то как складывается их жизнь.
По шкале «интернальности в области достижений» у шести респондентов интернальный локус контроля. У восьми же респондентов экстернальный локус контроля.
По шкале «интернальность в области неудач» у двух респондентов интернальный локус контроля. У 12 респондентов низкие показатели, то ест экстернальный локус .
Шкала «интернальности в семейных отношениях» у семи респондентов интернальный локус, у оставшихся семи респондентов экстернальный локус.
По шкале «интернальности в области производственных отношений» Только у одного респондента интернальный локус, у 13 же респондентов экстернальный.
Результаты по шкале «интернальности в области межличностных отношений». У шести респондентов интернальный локус. У восьми респондентов экстернальный.
По шкале «интернальности в отношении здоровья и болезней» У четырёх респондентов интернальный локус. У оставшихся десяти экстернальный локус.
Таким образом у большинства респондентов, наблюдается экстернальный локус контроля, то есть большинство респондентов будут склонны у тому, чтобы объяснить свои неудачи внешними обстоятельствами, нежели нести ответственность за происходящее самим.
Результаты по методике шкала тревоги Спилбергера-Ханина( STAI) представлены в следующий Таблице 2.
Таблица 2 — Результаты методики шкала тревоги Спилбергера-Ханина( STAI)
Пять респондентов набравших высокие показатели по личностной тревожности будут склонны ожидать неблагоприятного исхода от большинства ситуаций. Для респондента, чьи результаты набрали низкие показатели характерно не воспринимать большинство ситуаций как угрожающие.
Восемь респондентов с среднем уровнем личностной тревожности склонны сохранять эмоциональное равновесие и работоспособность, но только в тех ситуациях к которым они смогли адаптироваться.
Также нет респондентов с высоким показателем реактивной тревожности, это говорит о том, что на момент тестирования они не испытывали беспокойство, напряжение, нервозность. Само тестирование проходило в перерыве от рабочего процесса, то есть можно утверждать, что сложность данной профессии для респондентов не является фактором вызывающим тревожность.
Статистическая обработка результатов проводилась с помощью коэффициента ранговой корреляции Ч. Спирмена.
Для нашей выборке характерен экстернальный локус контроля. Хотя нельзя говорить о установлении закономерностей, так как рассмотренная нами выборка может иметь погрешности. Ниже представлена Таблица 3 с ранжированием полученных результатов по методикам.
Таблица 3 — Расчётная таблица с ранжированием для коэффициента корреляции Ч. Спирмена
Наш коэффициент корреляции имеет знак минус, следовательно корреляция будет обратной (отрицательной), то есть чем выше показатели по шкале общей интернальности, тем ниже показатели по уровню личностной тревожности.
Обратившись к таблице критических значений коэффициента корреляции Спирмена, мы увидим, что для нашей выборки критическим значением на уровне 0,05 будет равен 0,532, на рисунке представлена ось значимости с критическими значениями для выборки из 14 респондентов. Таким образом, можно говорить о том , что существует статистическая взаимосвязь на уровне 0,05 между локусом контроля и уровнем личностной тревожности
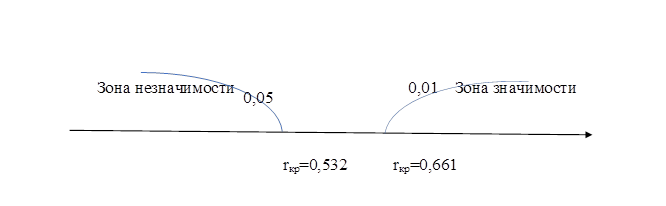
Рисунок 1 — Ось значимости
Нашу первоначальную гипотезу о том, что существует взаимосвязь между уровнями субъективного контроля и личностной тревожностью: чем выше уровень субъективного контроля, тем менее выражен уровень личностной тревожности, можно считать доказанной
В данной работе мы рассмотрели такое понятие как локус контроля и личностная тревожность, а также рассмотрели особенности работы судомеханика на судоремонтом заводе и выявили ряд требований к специалисту в данной области. Также рассмотрели информационную теорию эмоций и разобрали предпосылки для взаимосвязи для таких личностных свойств как локус контроля и тревожность.
На основании полученных данных мы выявили, что :
1. Для специалистов в данной области характерен экстернальный локус контроля.
2. Характерен средний и высокий уровень личностной тревожности.
3. Существует взаимосвязь между уровнями субъективного контроля и личностной тревожностью: чем выше уровень субъективного контроля, тем менее выражен уровень личностной тревожности
- Балансировочные приборы и балансировочные станки
- Вибрация механизмов.
- Критерии оценки качества балансировки механизмов.
- Примеры стендов для балансировки небольших роторов
- Балансировка жестких роторов
- Линейные и нелинейные модели механической системы. Нелинейность — фактор препятствующий проведению балансировки
- Резонанс конструкции — фактор препятствующий проведению балансировки
- Виды роторов и виды дисбаланса
Балансировочные приборы и балансировочные станки
Как уже отмечалось выше, балансировка – это процесс совмещения главной центральной оси инерции с осью вращения ротора.
Указанный процесс может выполняться двумя методами.
Первый метод предусматривает обработку цапф ротора, которая выполняется таким образом, чтобы ось, проходящая через центры сечения цапф с главной центральной осью инерции ротора. Подобная методика редко применяется на практике и не будет подробно рассмотрен в данной статье.
Второй (наиболее распространённый) метод предусматривает перемещение, установку или съём на роторе корректирующих масс, которые размещаются таким образом, чтобы ось инерции ротора максимально приблизилась к оси его вращения.
Перемещение, добавление или удаление корректирующих масс при балансировке может производиться с использованием различных технологических операций, в том числе: сверлением, фрезерованием, наплавкой, наваркой, завинчиванием или вывинчиванием винтов, выжиганием лучом лазера или электронным пучком, электролизом, электромагнит-ным наплавом и т.п.
Процесс балансировки может выполняться двумя способами:
В настоящее наиболее распространены балансировочные станки двух типов:
Вибрация механизмов.
Вибрация — это реакция конструкции механизма на воздействие циклической возбуждающей силы. Эта сила может иметь разную природу.
Центробежная сила, возникающая из-за неуравновешенности ротора — нескомпенсированная сила действующая на «тяжелую точку». Именно эта сила и вибрация ею вызванная устраняются балансировкой ротора.
Силы взаимодействия, имеющие «геометрическую» природу и возникающие вследствие погрешностей изготовления и монтажа сопрягаемых деталей. Указанные силы могут, например, возникать вследствие некруглости шеек вала, погрешностей профилей зубьев в зубчатых передачах, волнистости беговых дорожек подшипников, расцентровки сопрягаемых валов и т.п. В случае некруглости шеек ось вала будет смещаться в зависимости от угла поворота вала. Хотя такая вибрация также проявляется на частоте вращения ротора, устранить ее балансировкой практически невозможно.
Аэродинамические силы, возникающие при вращении рабочих колёс вентиляторов и других лопастных механизмов. Гидродинамические силы, возникающие при вращении рабочих колёс гидронасосов, турбин и т.п.
Электромагнитные силы, возникающие при работе электрических машин, например, вследствие несимметричности обмоток ротора, наличии короткозамкнутых витков и. т.п. причин.
Величина вибрации (например её амплитуда Ав) зависит не только от величины возбуждающей силы Fв, действующей на механизм c круговой частотой ω, но и от жесткости k конструкции механизма, его массы m , а также коэффициента демфирования C.
Для измерения вибрации и балансировки механизмов могут использоваться датчики различных типов, в том числе:
Итак вибрация — это реакция механизма на воздействие внешних сил. Величина вибрации зависит не только от величины силы, действующей на механизм, но и от жесткости конструкции механизма. Одна и та же по величине сила может приводить к разной вибрации. В механизмах с жесткой конструкцией опор, даже если вибрация и небольшая по величине, на подшипниковые узлы могут действовать значительные динамические нагрузки. Поэтому при балансировке механизмов с жесткими опорами применяют датчики силы, а не вибрации (виброакселерометры). Датчики вибрации применяют на механизмах с относительно податливыми опорами, когда действие неуравновшенных центробежных сил приводит к появлению заметной деформации опор и вибрации. Датчики силы применяют при жестких опорах, когда даже значительные силы, возникающие вследствие дисбаланса не приводят к появлению значительной вибрации.
Критерии оценки качества балансировки механизмов.
Качество балансировки роторов (механизмов) может оцениваться двумя способами. Первый способ предусматривает сравнение величины остаточного дисбаланса, определённого при выполнении балансировки, с допуском на остаточный дисбаланс. Указанные допуски для различных классов роторов установлены в ГОСТ ИСО 1940-1-2007. « Вибрация. Требования к качеству балансировки жестких роторов. Часть 1. Определение допустимого дисбаланса».
Однако выполнение указанных допусков не может полностью гарантировать эксплуатационную надёжность механизма, связанную с достижением минимального уровня его вибрации. Это объясняется тем, что величина вибрации механизма определяется не только величиной силы, связанной с остаточной неуравновешенностью его ротора, но также зависит ещё от ряда других параметров, в том числе: от жесткости k элементов конструкции механизма, его массы m , коэффициента демпфирования, а также частоты вращения. Поэтому для оценки динамических качеств механизма (в том числе качества его сбалансированности) в ряде случаев рекомендуется оценивать уровень остаточной вибрации механизма, который регламентируется рядом стандартов. Наиболее общим стандартом, регламентирующим допустимые уровни вибрации механизмов, является ГОСТ ИСО 10816-3-2002 «Вибрация. Оценка состояния машин по измерениям вибрации на невращающихся частях. Часть 3. Промышленные машины». С его помощью можно устанавливать допуска на любые виды машин с учётом мощности их электропривода.
Помимо этого универсального стандарта имеется ряд специализированных стандартов, разработанных для конкретных видов механизмов. Например, ГОСТ 31350-2007 «Вибрация. Вентиляторы промышленные. Требования к производственной вибрации и качеству балансировки», ГОСТ ИСО 7919-1-2002 «Вибрация машин без возвратно-поступательного движения. Измерения на вращающихся валах и критерии оценки. Общее руководство», . ГОСТ 16921-83 «Машины электрические вращающиеся. Допустимые вибрации» и т.д.
Примеры стендов для балансировки небольших роторов
рис.8 Схема балансировочного стенда
Балансировочный стенд состоит из механической части (подпружиненной платформы), на которой крепится подлежащий балансировке вентилятор или другой ротор, и измерительной части, выполненной на базе балансировочного прибора.
Смысл данной конструкции в следующем:
Балансировочный прибор измеряет амплитуду и фазу вибрации, вызванной центробежной силой. В используемой для балансировочных расчетов линейной модели предполагается, что вибрация имеет гармонический характер и ее величина (амплитуда) прямо пропорциональна величине дисбаланса. Применение пружин в качестве упругих элементов позволяет обеспечить хорошую линейность в широком диапазоне величин вибрации и высокую чувствительность к малым центробежным силам.
рис. 9 Пример балансировочного стенда.
рис. 10 И даже такое деревянное работает!
рис.11 Результат балансировки на деревянном стенде с рис 10.
Балансировка жестких роторов
Основной задачей балансировки является нахождение массы и места установки компенсирующих грузов, на которые действуют уравновешивающие центробежные силы. Как было сказано выше для жестких роторов в общем случае необходимо и достаточно установить два компенсирующих груза. При этом будет устранен как статический, так и динамический дисбаланс ротора. Общая схема измерения вибрации при проведении балансировки выглядит следующим образом.
рис 6 Выбор точек измерения и мест установки грузов (плоскостей коррекции) при балансировке в двух плоскостях
На подшипниковые опоры в точках 1 и 2 устанавливаются датчики вибрации. На роторе закрепляется метка оборотов, обычно приклеивается светоотражающая лента. Метка оборотов используется лазерным тахометром для определения скорости вращения ротора и фазы вибросигнала.
рис 7. Установка датчиков при балансировке в двух плоскостях. 1,2 — датчики вибрации, 3 — отметчик, 4- измерительный блок, 5- ноутбук
В большинстве случаев динамическая балансировка проводится методом трех пусков. Метод основан на том, что на ротор последовательно в 1 и 2 плоскость устанавливаются пробные грузы известной массы и по результатам изменения параметров вибрации рассчитываются массы и место установки уравновешивающих грузов.
Место установки груза называется плоскостью коррекции. Обычно плоскости коррекции выбираются в районе подшипниковых опор, на которые установлен ротор.
При первом пуске измеряется исходная вибрация. Затем на ротор ближе к одной из опор устанавливается пробный груз известной массы. Производится второй пуск и измеряются параметры вибрации, которые должны измениться вследствие установки пробного груза. Затем пробный груз в первой плоскости снимается и устанавливается во второй плоскости. Производится третий пуск и измеряются параметры вибрации. Пробный груз снимается и программа автоматически рассчитывает массы и место (углы) установки уравновешивающих грузов.
Смысл установки пробных грузов заключается в том, чтобы определить как система реагирует на изменение дисбаланса. Массы и место установки пробных грузов известны, поэтому программа может рассчитать так называемые коэффициенты влияния, показывающие как внесение известного дисбаланса влияет на параметры вибрации. Коэффициенты влияния являются характеристиками самой механической системы и зависят от жесткости опор и массы (инерционности) системы ротор-опоры.
Для однотипных механизмов одинаковой конструкции коэффициенты влияния будут близки. Можно сохранить их в памяти компьютера и использовать для балансировки однотипных механизмов без проведения пробных пусков, что значительно повышает производительность балансировки. Заметим, что массу пробных грузов нужно выбирать такой, чтобы параметры вибрации заметно менялись при установке пробных грузов. В противном случае возрастает погрешность вычисления коэффициентов влияния и ухудшается качество балансировки.
Как можно понять из рис. 1 центробежная сила действует в радиальном направлении, т.е. перпендикулярно оси ротора. Поэтому датчики вибрации надо устанавливать так, чтобы их ось чувствительности была направлена также была направлена в радиальном направлении. Обычно жесткость фундамента в горизонтальном направлении меньше, поэтому вибрация в горизонтальном направлении выше. Поэтому для повышения большей чувствительности датчики следует устанавливать так, чтобы их ось чувствительности также была направлена горизонтально. Хотя принципиальной разницы нет. Помимо вибрации в радиальном направлении необходимо контролировать вибрацию в осевом направлении, вдоль оси вращения ротора. Эта вибрация обычно вызывается не дисбалансом, а другими причинами, в основном связанными с несоосностями и перекосами валов, соединенных через муфту.
Эта вибрация балансировкой не устраняется, в этом случае требуется проводить центровку. На практике обычно в таких механизмах присутствует и дисбаланс ротора и несоосность валов, что значительно усложняет задачу устранения вибрации. В таких случаях сначала необходимо провести центровку, а затем уже балансировку механизма. ( Хотя при сильном моментном дисбалансе вибрация также возникает и в осевом направлении за счет «скручивания» конструкции фундамента)
Линейные и нелинейные модели механической системы. Нелинейность — фактор препятствующий проведению балансировки
При балансировке жестких роторов для балансировочных расчетов применяют математические модели, которые называются линейными. Линейность модели означает, что в такой модели одна величина пропорционально (линейно) зависит от другой. Например, если нескомпенсированную массу на роторе увеличить в два раза, то и величина вибрации увеличится в два раза. Для жестких роторов можно применять линейную модель, поскольку они не деформируются. Для гибких роторов применять линейную модель уже нельзя. Для гибкого ротора при увеличении массы тяжелой точки во время вращения возникнет дополнительная деформация, и помимо массы, увеличится также радиус расположения тяжелой точки. Поэтому для гибкого ротора вибрация увеличится более чем в два раза, и обычные методы расчета работать не будут. Также к нарушению линейности модели может привести изменение упругости опор при их больших деформациях, например когда при малых деформациях опор работают одни конструктивные элементы, а при больших в работу включаются другие элементы конструкции. Именно поэтому нельзя балансировать механизмы не закрепленные на фундаменте, а, например, просто установленные на пол. При значительных вибрациях сила дисбаланса может отрывать механизм от пола, тем самым существенно меняя характеристики жесткости системы. Лапы двигателей должны быть надежно закреплены, болтовые крепления затянуты, толщина шайб должна обеспечивать достаточную жесткость крепления и т.д. При разбитых подшипниках возможно значительное смещение вала и его удары, что также приведет к нарушению линейности и невозможности проведения качественной балансировки.
Резонанс конструкции — фактор препятствующий проведению балансировки
Ранее мы уже упоминали, что ротора делятся жесткие и гибкие. Жесткость или гибкость ротора не следует путать с жесткостью или подвижностью опор (фундамента) на который установлен ротор. Ротор считается жестким, когда его деформацией (изгибом) под действием центробежных сил можно пренебречь. Деформация гибкого ротора относительно велика и ей пренебречь нельзя.
В этой статье мы рассматриваем только балансировку жестких роторов. Жесткий (недеформируемый) ротор может быть в свою очередь установлен на жесткие или подвижные (податливые) опоры. Понятно, что и эта жесткостьподвижность опор является относительной в зависимости от скорости вращения ротора и величины возникающих центробежных сил. Условной границей является частота собственных колебаний опорфундамента ротора. Для механических систем форма и частота собственных колебаний определяются массой и упругостью элементов механической системы. То есть частота собственных колебаний является внутренней характеристикой механической системы и не зависит от внешних сил. Будучи отклоненным от состояния равновесия, опоры за счет упругости стремятся вернуться в положение равновесия. Но вследствие инерции массивного ротора этот процесс носит характер затухающих колебаний. Эти колебания и являются собственными колебаниями системы ротор-опоры. Их частота зависит от соотношения массы ротора и упругости опор.
Когда ротор начинает вращаться и частота его вращения приближается к частоте собственных колебаний, амплитуда вибрации резко возрастает, что может привести к разрушению конструкции.
Возникает явление механического резонанса. В области резонанса изменение скорости вращения на 100 обмин может привести к увеличению вибрации в десятки раз. При этом (в области резонанса) фаза вибрации меняется на 180°.
рис.5 Изменение амплитуды и фазы колебаний механической системы при изменении частоты воздействия внешней силы.
Если конструкция механизма расчитана неудачно, и рабочая частота вращения ротора близка к частоте собственных колебаний, то эксплуатация механизма становится невозможной из-за недопустимо высокой вибрации. Балансировка обычным способом тоже невозможна, так как даже при незначительном изменении скорости параметры вибрации резко меняются. Для балансировки в области резонанса применяются специальные методы, не рассматриваемые в данной статье. Определить частоту собственных колебаний механизма можно на выбеге (при выключении вращения ротора) или методом ударного воздействия с последующим спектральным анализом отклика системы на удар.
Для механизмов, рабочая частота вращения которых лежит выше частоты резонанса, то есть работающих в зарезонансном режиме, опоры считаются подвижными и для измерения используются датчики вибрации, в основном виброаселерометры, измеряющие ускорение элементов конструкции. Для механизмов работающих в дорезонансном режиме, опоры считаются жесткими. В этом случае применяют датчики силы.
Виды роторов и виды дисбаланса
С учетом прочности материала ротора и величины действующих на него центробежных сил, роторы можно разделить на два вида — жесткие роторы и гибкие.
Жесткие роторы на рабочих режимах под действием центробежной силы деформируются незначительно и влиянием этой деформации в расчетах можно пренебречь.
Деформацией гибких роторов пренебречь уже нельзя. Деформация гибких роторов усложняет решение задачи балансировки и требует применения других математических моделей, по сравнению с задачей балансировки жестких роторов. Следует отметить, что один и тот же ротор на малых скоростях вращения может вести себя как жесткий, а при больших скоростях — как гибкий. В дальнейшем мы будем рассматривать только балансировку жестких роторов.
В зависимости от распределения неуравновешенных масс по длине ротора можно выделить два вида дисбаланса — статический и динамический (моментный). Соответственно говорят о статической и динамической балансировке ротора.
Статический дисбаланс ротора проявляется без вращения ротора, то есть в статике, когда ротор под действием силы тяжести разворачивается «тяжелой точкой» вниз. Пример ротора со статическим дисбалансом приведен на рис.2
рис.2 Статический дисбаланс ротора. Под действием силы тяжести ротор разворачивается «тяжелой точкой» вниз
Динамический дисбаланс проявляется только при вращении ротора. Пример ротора с динамическим дисбалансом приведен на рис. 3.
рис.3 Динамический дисбаланс ротора. Силы Fц1 и Fц2 создают момент, стремящийся развернуть ротор.
В этом случае несбалансированные равные массы М1 и М2 находятся в разных плоскостях — в разных местах по длине ротора. В статическом положении, т.е. когда ротор не вращается на ротор воздействует только сила тяжести и массы уравновешивают друг друга. В динамике при вращении ротора, на массы М1 и М2 начинают действовать центробежные силы Fц1 и Fц2. Эти силы равны по величине и противоположны по направлению. Однако, поскольку они приложены в разных местах вала по длине и не находятся на одной линии, эти силы не компенсируют друг друга. Силы Fц1 и Fц2 создают момент, приложенный к ротору. Поэтому такой дисбаланс еще называют моментным. Соответственно на подшипниковые опоры действуют нескомпенсированные центробежные силы, которые могут значительно превышать расчетные и уменьшать ресурс работы подшипников.
Поскольку данный вид дисбаланса проявляется только в динамике при вращении ротора он называется динамическим. Его невозможно устранить в статике балансировкой «на ножах» или другими аналогичными способами. Для устранения динамического дисбаланса необходимо установить два компенсирующих груза, которые создадут момент равный по величине и противоположный по направлению моменту, возникающему от масс М1 и М2. Компенсирующие массы не обязательно должны устанавливаться напротив масс М1 и М2 и быть равными им по величине. Главное, чтобы они создавали момент, полностью компенсирующий момент дисбаланса.
В общем случае массы М1 и М2 могут быть не равны друг другу, так что будет иметь место сочетание статического дисбаланса и динамического. Теоретически доказано, что для жесткого ротра для устранения его дисбаланса необходимо и достаточно установить два груза разнесенных по длине ротора. Эти грузы будут компенсировать как момент, возникающий вследствие динамического дисбаланса, так и центробежную силу, возникающую вследствие несимметричности массы относительно оси ротора (статический дисбаланс). Обычно динамический дисбаланс характерен для длинных роторов, типа валов, а статический — для узких. Однако, если узкий ротор установлен с перекосом относительно оси, или деформирован («восьмерка»), то в этом случае будет возникать трудноустранимый динамический дисбапланс. (см. рис. 4), поскольку в этом случае сложно установить корректирующие грузы, создающие нужный компенсирующий момент.
рис.4 Динамический дисбаланс узкого ротора. Силы F1 и F2 не лежат на одной линии и не компенсируют друг друга.
В связи с тем, что из-за узкого ротора плечо для создания момента небольшое, могут потребоваться корректирующие грузы большой массы. Но при этом дополнительно возникает т.н. «индуктированный дисбаланс», связанный с деформацией узкого ротора под действием центробежных сил от корректирующих масс. (см. например «Методические указания по балансировке жестких роторов (к ГОСТ 22061-76 Машины и технологическое оборудование. Система классов точности балансировки. Основные положения)» Раздел 10. С ИСТЕМА «РОТОР — ОПОРЫ» ) Это заметно для узких колёс вентиляторов, у которых помимо силового дисбаланса действует ещё и аэродинамический дисбаланс. Причём надо понимать, что аэродинамическая неуравновешенность, точнее аэродинамическая сила прямо пропорциональна угловой скорости ротора, а для её компенсации используется центробежная сила корректирующей массы, которая пропорциональна квадрату угловой скорости. Поэтому эффект балансировки может иметь место только на конкретной частоте балансировки. На других частотах вращения возникает дополнительная погрешность. Тоже самое можно сказать об эл. магнитных силах в эл. двигателе, которые также пропорциональны угловой скорости. То есть устранить при помощи балансировки все причины вибрации механизма невозможно.




